2318 results for "earn" across all locations
Learning Joint 2D-3D Representations for Depth Completion
Y. Chen, B. Yang, M. Liang, R. Urtasun
We design a simple yet effective architecture that fuses information between 2D and 3D representations at multiple levels to learn fully fused joint representations at multiple levels, and show state-of-the-art results on the KITTI depth completion benchmark. [PDF]
International Conference on Computer Vision (ICCV), 2019
UberPITCH – Celebrating Entrepreneurship Across Europe

Uber design night: coming together to learn, engage, and inspire
Our latest Design Night hosted in Amsterdam spotlighted accessibility, featuring Erica Ellis and local industry leaders.
Uber design night: coming together to learn, engage, and inspire
Our latest Design Night hosted in Amsterdam spotlighted accessibility, featuring Erica Ellis and local industry leaders.
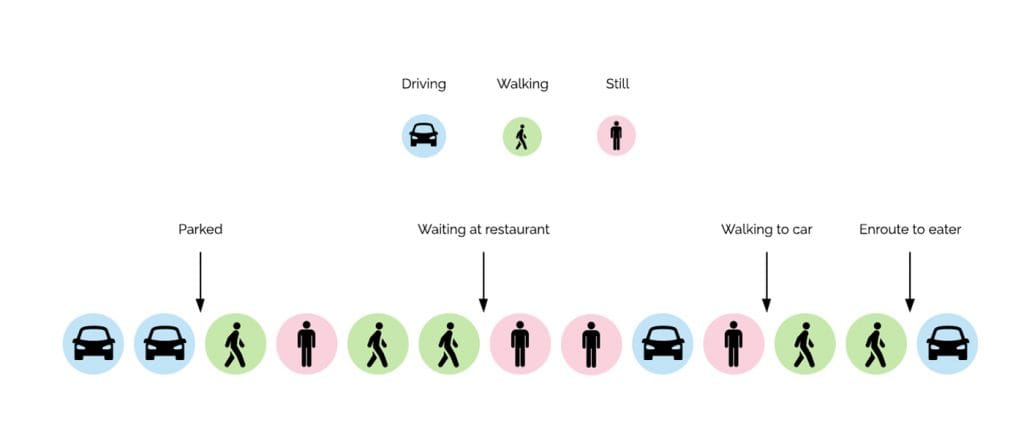
How Trip Inferences and Machine Learning Optimize Delivery Times on Uber Eats
Using GPS and sensor data from Android phones, Uber engineers develop a state model for trips taken by Uber Eats delivery-partners, helping to optimize trip timing for delivery-partners and eaters alike.
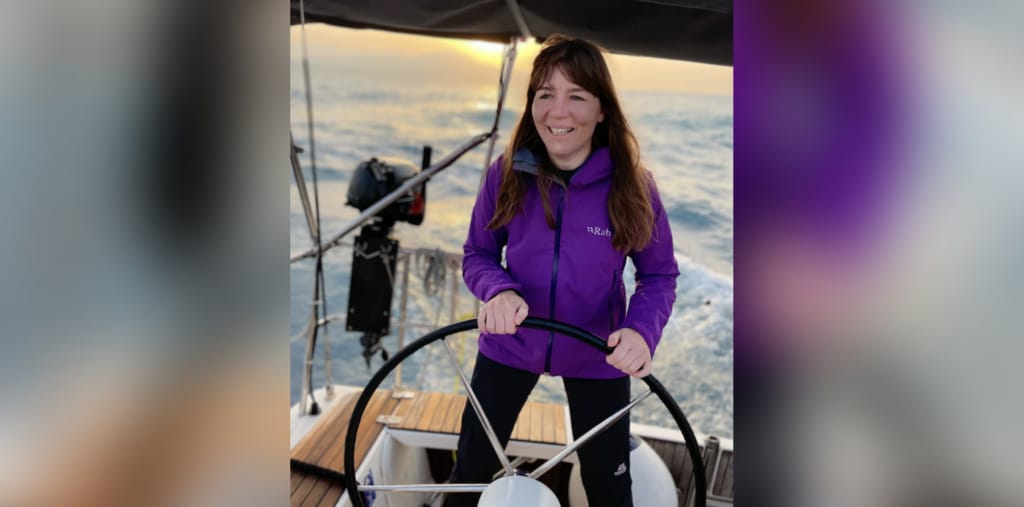
From Math to Machine Learning: Anastasia’s Tech Journey to Uber
Sr. Software Engineer Anastasia Tugaenko explains how she is engineering a new career path at Uber after attending European Women in Tech last year.
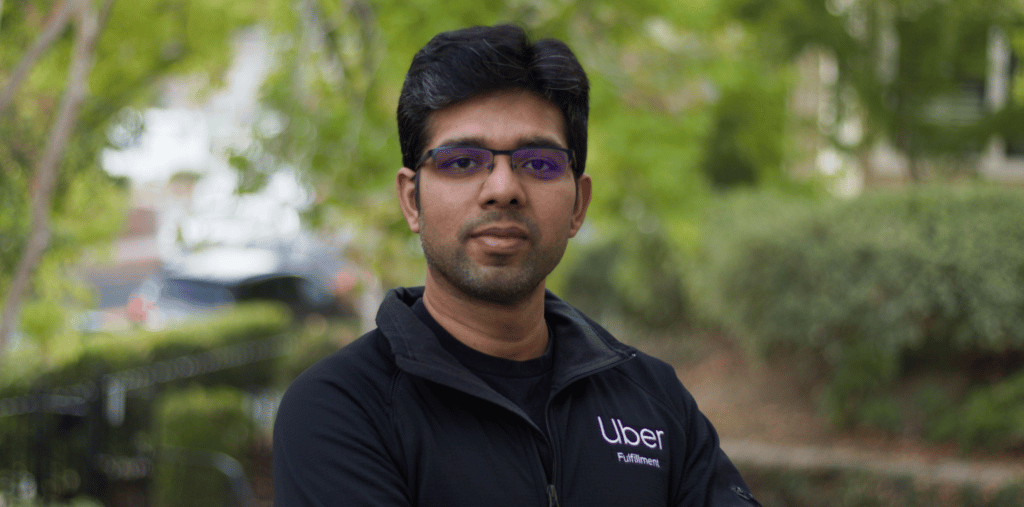
What Madan’s learned in 8 years as part of Uber engineering
Madan Thangavelu is a Director of Marketplace Engineering leading teams that power the logistics behind orders, fares, and product selection.
DeepETA: How Uber Predicts Arrival Times Using Deep Learning

Self-Reporting
As a driver-partner in Vancouver, you’re required to self-report: vehicle defects, vehicle recalls, and criminal convictions or driving violations. Keep reading to learn more about self-reporting and how to self-report.

Year of The Pig
Being looked after by the “intelligence” (文昌星) star this year, 2020 poses a good opportunity for people born in the year of the Pig to learn and acquire new knowledge.